Cart title
There are no more items in your cart



















The SBS SM-3 Seeing Monitor is essentially identical to the earlier SM-2 but with a new housing. Like the SM-2, it is based on a high QE, low noise QHY CMOS sensor, a high quality 100 mm f/3.5 lens, and custom seeing monitoring software written by Dr. Alan Holmes. The SM-3 seeing monitor constantly monitors seeing over a 12-hour period.
| Carrier | Description | Estimated Delivery | ||
|---|---|---|---|---|
 |
Home delivery - International | Home delivery - International |
Friday, 23 May - Friday, 30 May |
|
Home delivery - International
Home delivery - International
Estimated delivery:
Friday, 23 May - Friday, 30 May
Seeing Monitor SBS SM-3
With the SBS SM-2 Seeing monitor, you too can now analyze the quality of your observatory's Seeing.
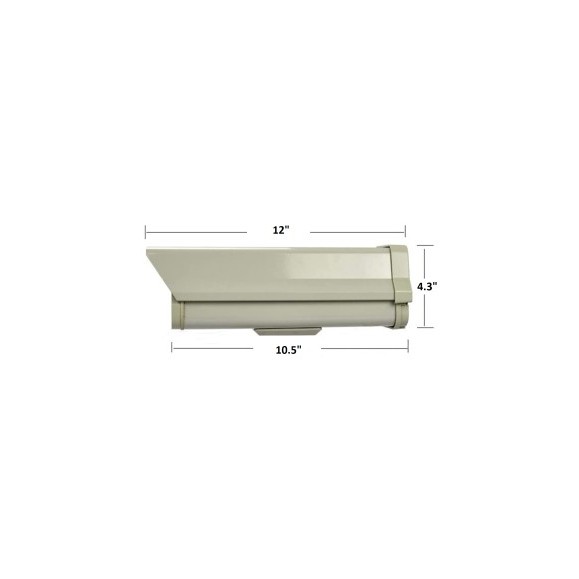
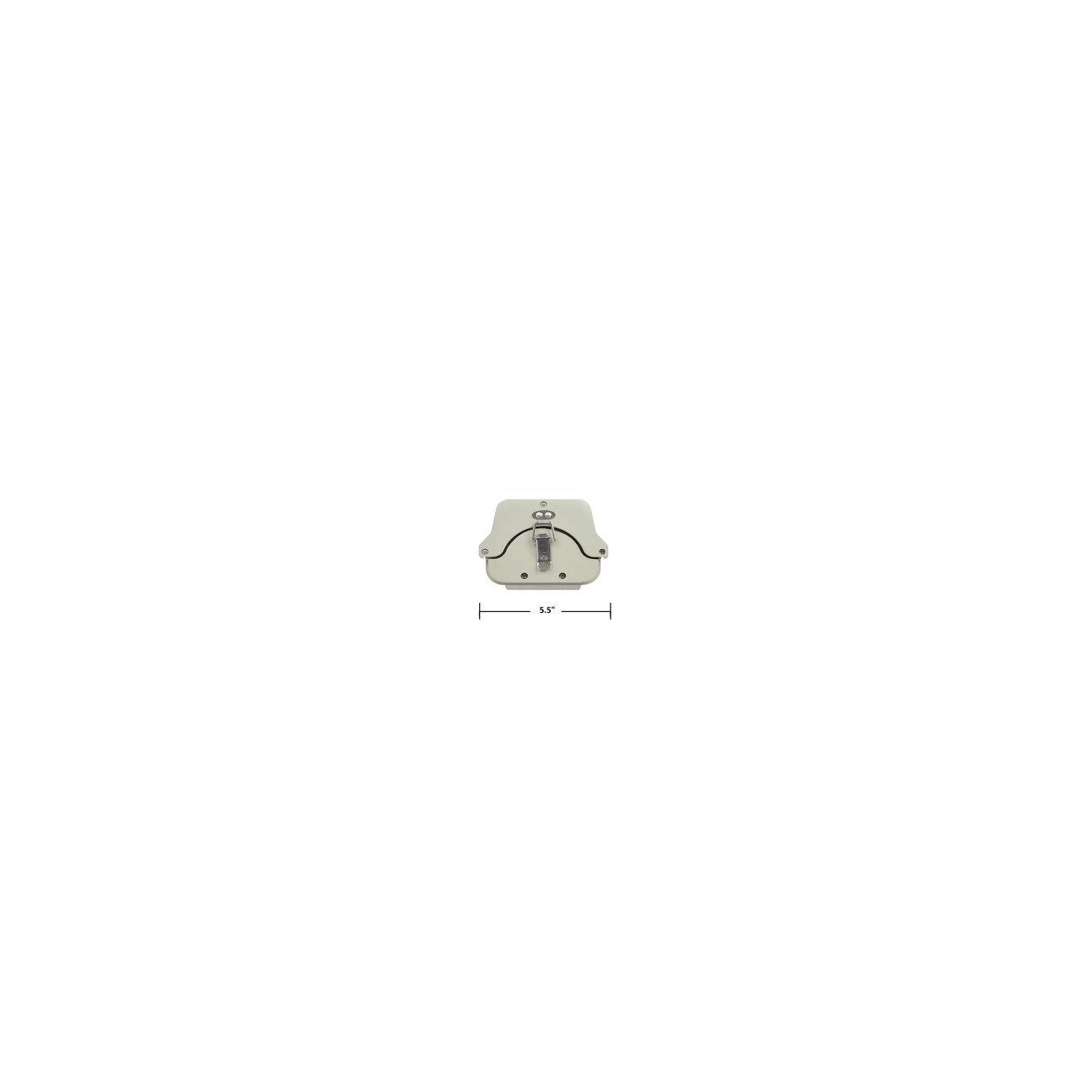
The SBS SM-3 Seeing Monitor uses a high QE, low noise QHY CMOS sensor and a high quality 100 mm f/3.5 lens, as well as custom seeing monitor software written by Dr. Alan Holmes. The Seeing Monitor constantly monitors the vision over a 12-hour period and displays the measurement on the computer monitor, recording the data in a text file for later analysis. The camera is mounted in a weatherproof aluminum case with an optical quality window to protect it from the elements. Once the cover is removed, the camera can be focused and the pointing can be adjusted independently. The computer interface is USB2. There is space to install a powered USB extender in the aluminum case, under or behind the camera.
SM-3 details
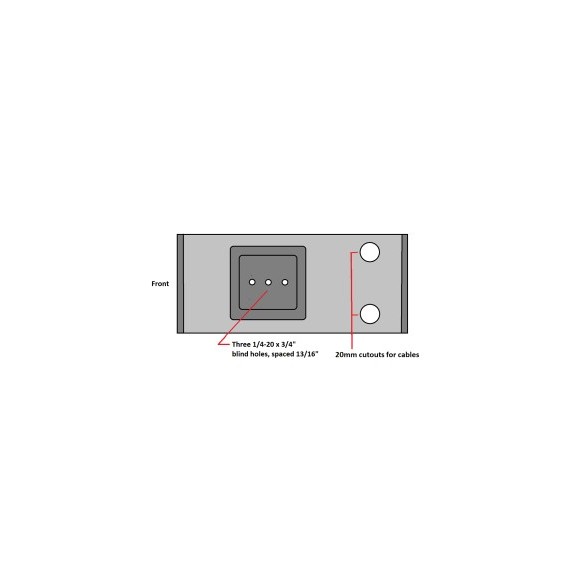
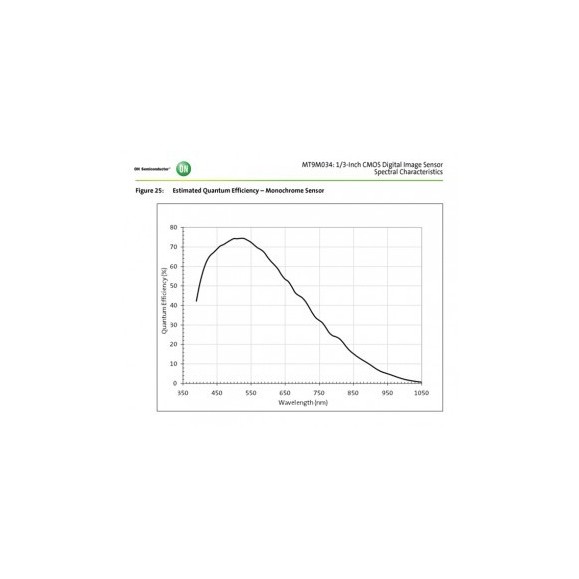
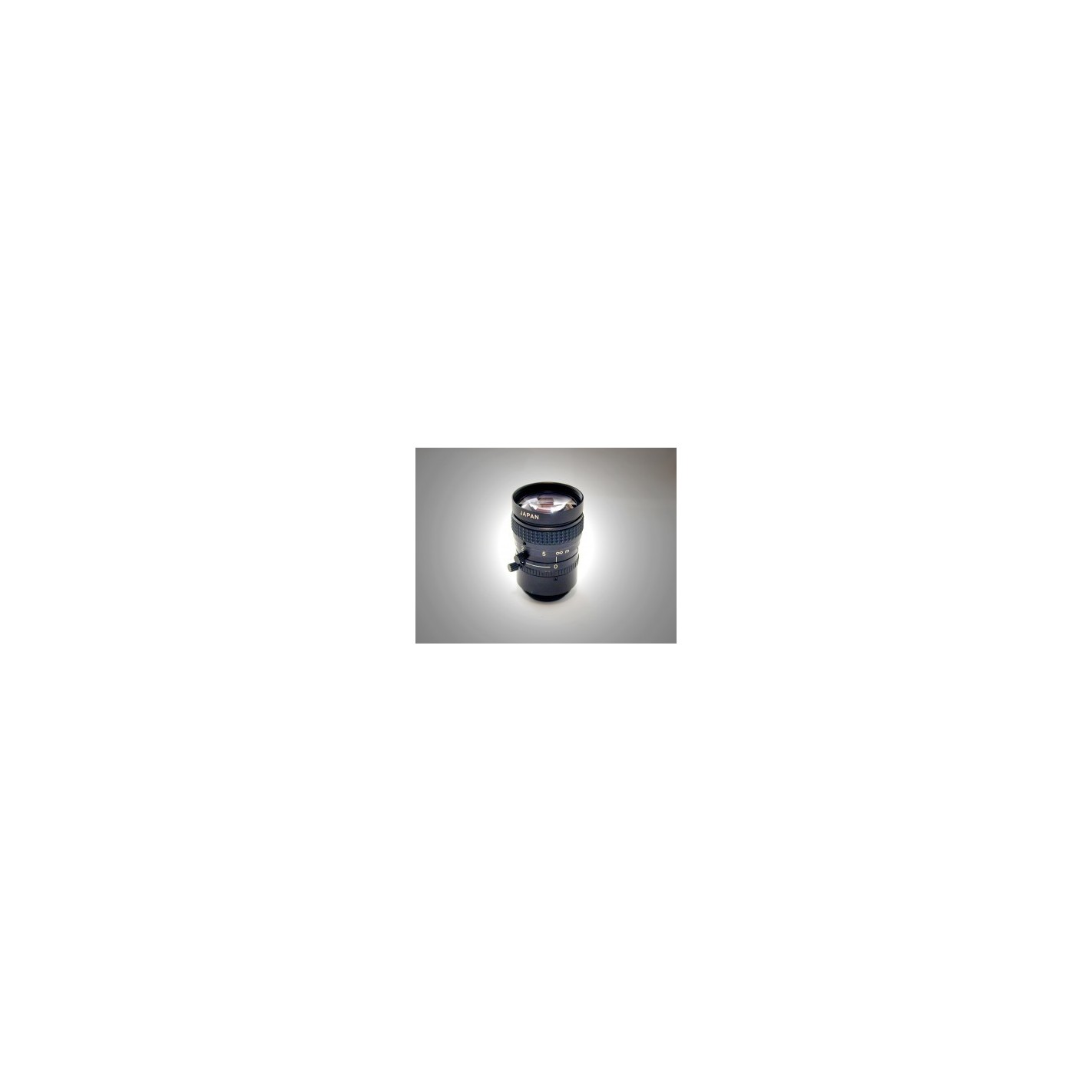
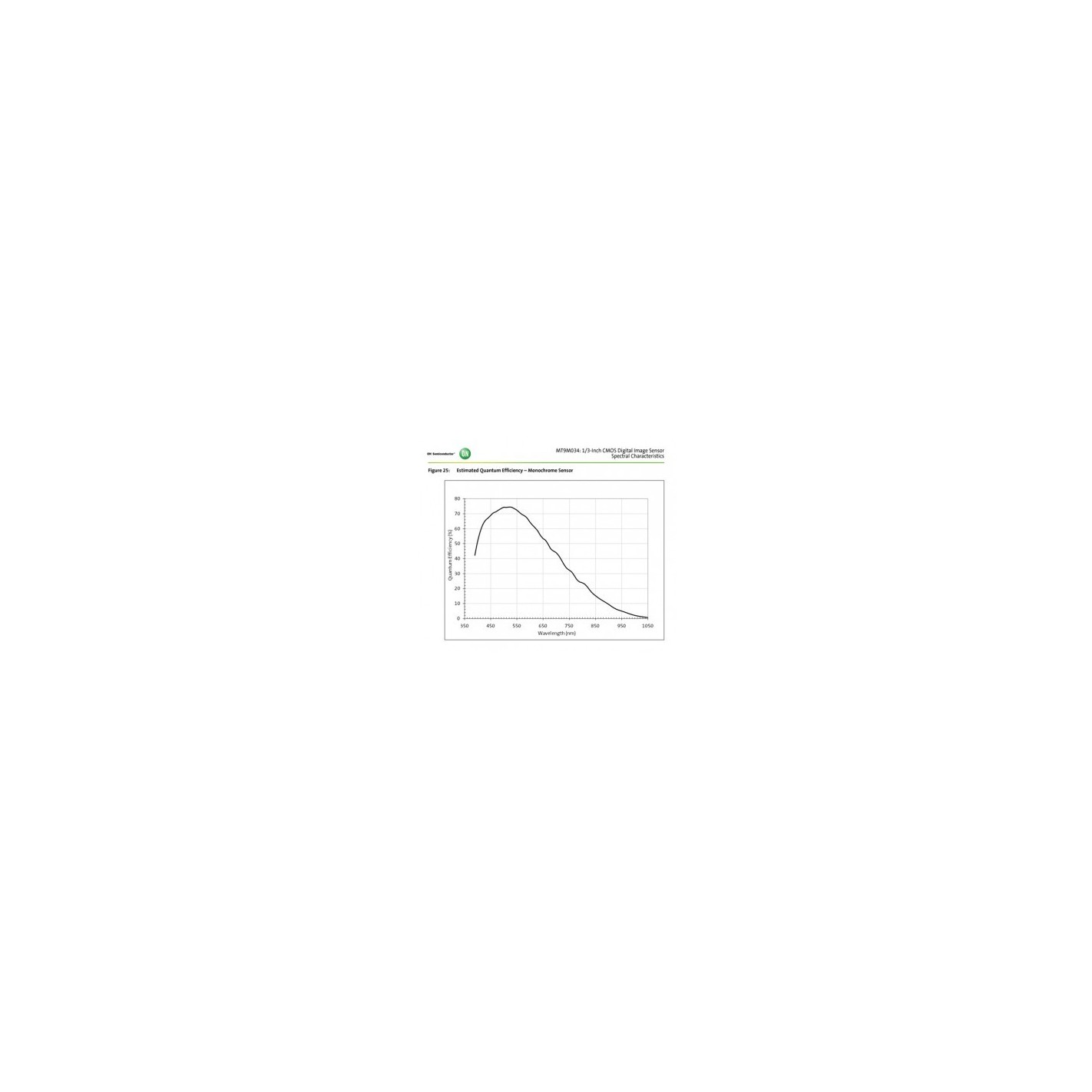
The SM-3 vision monitor is essentially the same as the earlier SM-2, except for the new housing, minor changes to the internal alt az camera mounting adjustments, and the bottom mounting hole configuration. Otherwise, in operation it is identical to the SM-2. The SM-3 continues to use the QHY 5L-II camera, a 1.2-megapixel MT9M034 CMOS with exceptionally high QE (74%) and exceptionally low read noise (~5e-). The sensor's on-chip FPN (Fixed Pattern Noise) calibration function solves one of the main problems of CMOS technology, resulting in clear and uniform images, even at high gain. The lens is a high quality 100mm f/3.5 C-mount lens made in Japan, ideal for this application.
The SM-3 seeing monitor is particularly useful for those with a permanent installation, but also for those who must set up every night to take astro images. By reporting and plotting the seeing from night to night and hour to hour, the user can determine the optimum time to attempt high-resolution images and the times when perhaps more suitable equipment for wide-field, lower-resolution images might be advisable. The Seeing Monitor integrates the necessary hardware into a weatherproof case and includes custom software. Seeing is displayed in units of the expected zenith half-width maximum (FWHM) in arcseconds for a long-exposure stellar image.

Theory of operation
Most professional observatories use the Differential Image Motion Monitor (DIMM) technique to measure seeing. This technique is implemented in hardware by using a two-hole mask over an 8- to 11-inch Schmidt-Cassegrain telescope aperture, and measuring the root mean square (rms) fluctuation of the spacing of the two spots seen when a bright star is imaged slightly out of focus with a fast camera. The reason for measuring two spots is that aggregate motion of the two spots due to poor tracking or wind vibration can thus be rejected. However, the resulting system is complicated to automate, and invariably also requires an automated enclosure to house the telescope, bringing the total cost to many thousands of dollars. One of the problems with this approach is that it completely ignores the tube currents in the SCT, which are neither small nor correlated throughout the aperture. The approach used with the SBS Seeing Monitor is to use a fixed single-aperture system looking at Polaris, mounted on a heavy solid spring. This eliminates wind motion and tracking error. Polaris moves through the space of a measurement, so the linear drift of the centroid of the Polaris position is determined and corrected for. We call this the SIMM technique.
An accurate seeing measurement requires exposures of 0.01 second or faster to freeze the seeing, and avoid errors due to the star's motion being averaged over a long exposure. In the case of the SM-2, the software collects 256 frames of seeing, each with an exposure of 0.01 seconds. The rms motion of the image is then determined. Collecting and processing 256 frames takes approximately one minute of time. A high-quality lens (Fig. One, above) with a focal length of 100 mm will achieve subpixel accuracy with centroid calculation, and the motion of Polaris over the course of a night can be contained on the CMOS sensor with a focal length of 100 mm. Over the course of a night, Polaris can move in a 180-degree arc, so its motion must be accounted for in any long-term tracking plan.
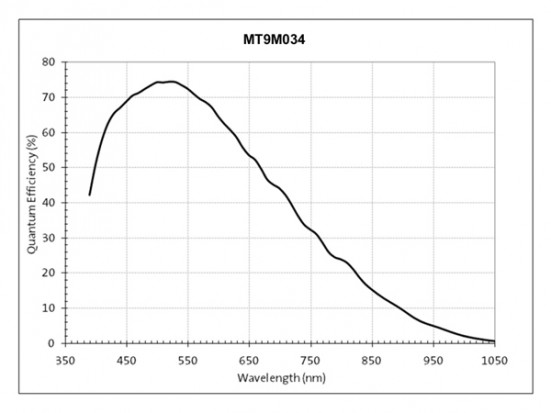

Figure two: Two summed exposures of the Polaris field
At the latitude of Santa Barbara, California (35 degrees), the background noise of an SM-3 with a 100 mm lens is about 0.6 arc seconds FWHM. This is measured indoors at night viewing an LED of comparable brightness to Polaris, being driven slowly in a horizontal direction. Understand that this low value will add in an rms sense to the actual view at low levels. Thus, if an SM-3 with a 100 mm lens measures a view of 1.0 arcseconds, subtract the measured bias of 0.6 seconds (in an rms sense) to get the actual view, 0.8 arcseconds. Conversion of the vision measured at Polaris elevation to a zenith value is done using a well-accepted formula, where the zenith vision is equal to the vision measured for Polaris divided by the airmass to the power of 0.6. The airmass is equal to 1 divided by the airmass to the power of 0.6. The mass of air is equal to 1 divided by the mass of air to the power of 0.6. The mass of air is equal to 1 divided by the cosine of the quantity 90 degrees minus the latitude.
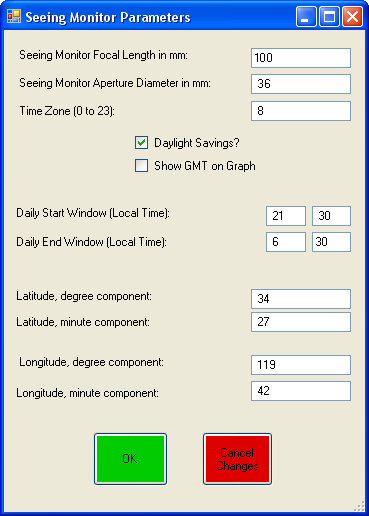
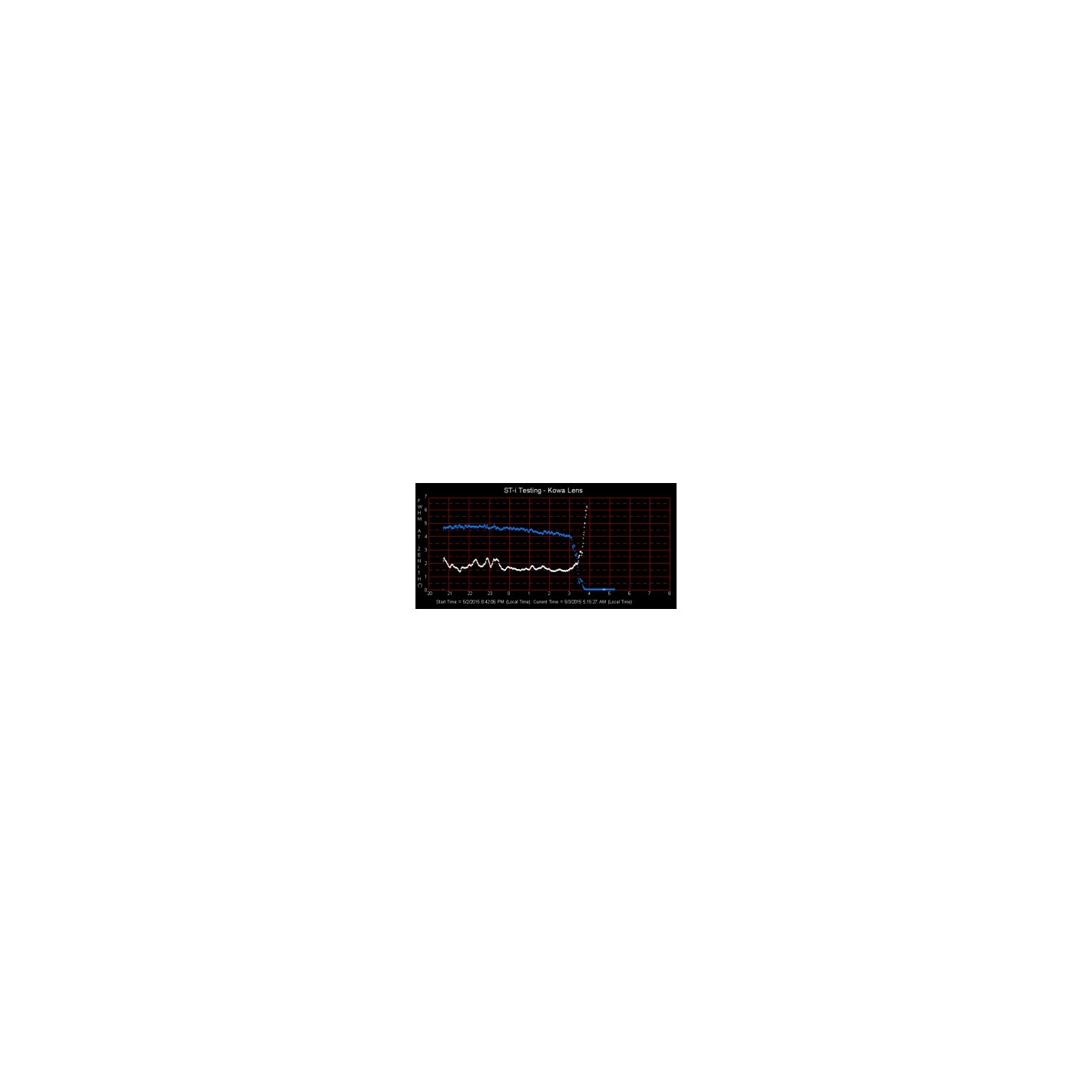
Vision Monitor menu: here you can choose to immediately start the vision recording. If you want to start at a specific time, select Timed Based and the program will run for the indicated period. When logging starts, a graph will appear showing the zenith FWHM (full width half maximum of the star image), with a start time that is the number of the previous hour, and showing 12 hours of data. The length of this plot is set to 12 hours. The graph, and a text file that records the seeing data will be written to the C:SeeingMonitor directory every 5 minutes. The name of the seeing graph never changes, so you can have an external program monitor this folder and put the file on a web site, if you wish. The name of the logged data file is the same each time if you start immediate logging, and will overwrite the previous night's file, so you must manually rename the previous night's text file if you want to save it. When operating in multi-night mode using a scheduled start and end, the file name is customized with the date, so the previous night's data will not be overwritten. The display graph is always overwritten.
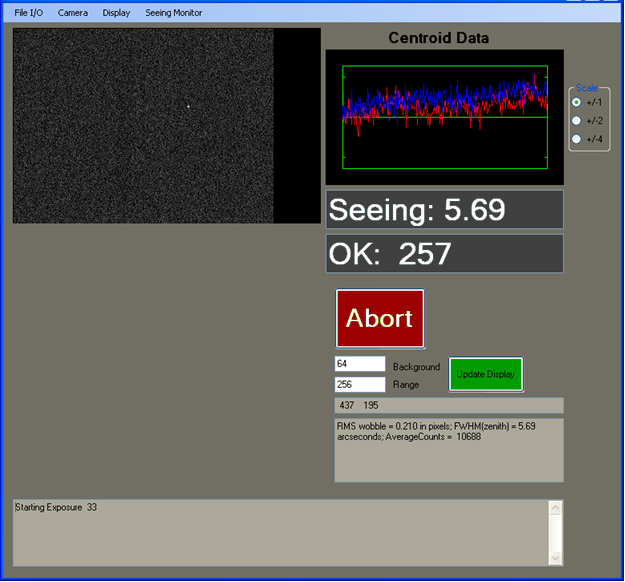
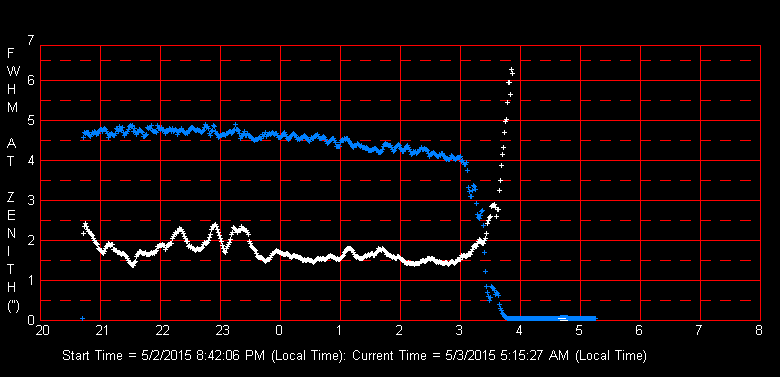
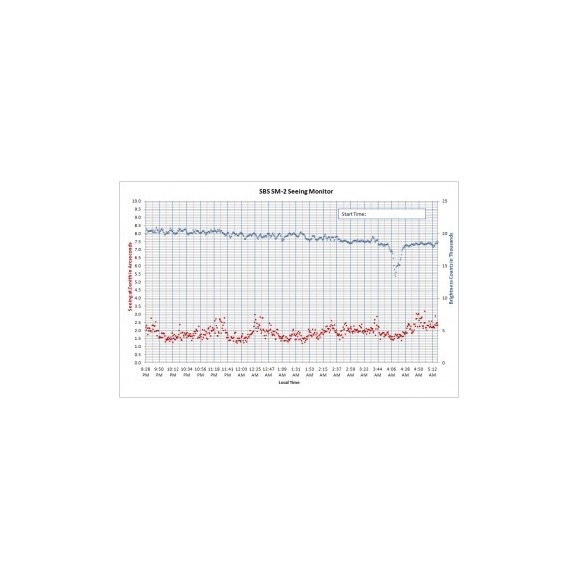
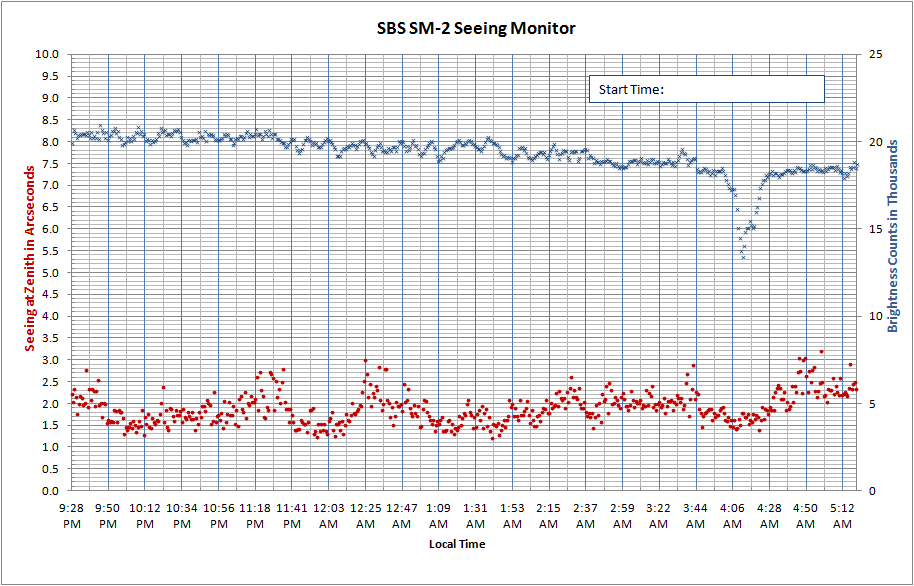
In the graph in Figure 5, above, the white data points record the number of seeing in arcseconds. The blue data points represent the polaris brightness at the time of each measurement. It can be seen from the graph that on this night the seeing began to deteriorate around 3:00AM and rapidly worsened over the next 45 minutes until it was useless to take images. The brightness of Polaris also began to deteriorate at the same time, indicating the presence of clouds or fog. Even sampling at 100 times per second, when the seeing is REALLY bad, the seeing monitor probably underestimates how bad it is, since the image is just a boiling blob. Even though the seeing monitor underestimates these terrible nights, it provides a clear indication that it would be better to do something other than astro-imaging that night. The usefulness of the seeing monitor is shown in the figure below. This is an animation of 13 plots taken over a two-week period. As you can see, seeing, and the patterns of good and bad seeing per night, vary greatly, making it almost impossible to rely on history or experience to predict when the night will or will not be worth hourly exposure efforts.
Seeing Monitor SBS SM-3


Deliver it 7/15 days
Deliver it 29/36 days




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}